
How does the PSK system work?
The developed PSK fpv system is for driving remote controlled vehicles, for example cars and trucks, in the first person view with an onboard camera and with a steering wheel and pedals.
For this, the 2,4Ghz frequency band is used to transmit the data signal from the remote control to the vehicle and the 5,8Ghz band is used to transmit the video signal from the vehicle to the remote control. The analog video transmission is the same Technologie which is used in racing drones.
During the development of the system it was set a high value to an easy harmonic handling for driving a correctly set model.
The system consists four components basically:
Remote control TX1:
With the actual remote control TX1 the control signals will read, set, calculated and transmit.
Furthermore it receives the video signal of the onboard camera.
It's possible to drive a model "conventional" only with this remote control with the levers or, if you put it on, to drive it with the steering wheel and the pedals.
You find the technical datas on technical specifications of the remote control.

TX1 (prototype)

RX1 (prototype)
Receiver RX1:
The receiver is mounted on the remote controlled vehicle. With it, the control signals will received, read, calculated and give out.
Furthermore, the receiver transmits the video- and audio signal from the onboard camera as well as the onboard microphones and the telemetry datas.
Also it contains an intelligent light mode to switch breaking- and reverse light.
You find the technical datas on technical specifications of the receiver.
Steering wheel (incl. pedals) LK1:
The steering wheel is used to generate the signal to steer the model and the connected break- and gas pedal generate the signal for the engine respective installed breaks.
Furthermore the remote control can be put on. On the reverse is a cinch splitter to connect 2 different output devices for the video and audio signals as well as a power connection to charge the battery of the remote control.
With a installed indicator lever you are able to switch on 2 different predicted functions.
You find the technical datas on technical specifications of the steering wheel.

LK1 (prototype)
KH1 (prototype)
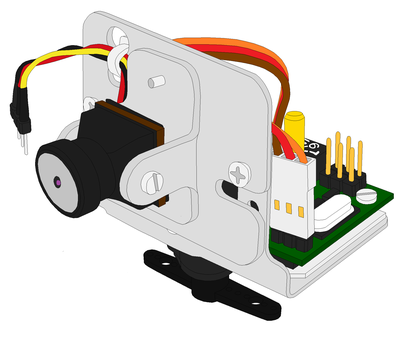
Camera holder KH1:
With the camera holder a already installed camera will mounted on the model and connected to the receiver.
A servo provides an active corner view which means the camera always turns with the steering. You can set the amplification of the turning as well as the trimming independently from the steering servo.
It's possible to connect the camera and the servo directly on the receiver RX1 and it's also possible to "loop" the servo for the steering over the camera holder.
You find the technical datas on technical specifications of the camera holder.

Here is a video which shows some functions of the PSK-system in practice.
Repeater (in development):
Because it's only legal to send with 25mW in the 5,8Ghz band in the European union, the range of the video- and audio signal is round about 200m in open area. In buildings or in uneven terrain the range can even decrease to a few dozen meters.
To avoid this problem, the PSK-Repeater is in development. It's able to connect a 25m long cable on it and over the steering wheel to the remote control. Whit this the video- and audio signals are passed on. Furthermore it's able to connect on a Repeater 3 further Repeater to create a "star network".
The remote control and all connected repeater communicate each other to identify where is the best receive. The system switches automatically and nearly seamlessly the corresponding signal to the output of the steering wheel and with it the connected screen or goggles.
This means all in all, a save transmission of the video- and audio signal is always possible in every terrain.
If you have questions to the repeater system, please contact.
Why an analog video- and audio transmission?:
Warum eine analoge Bild- und Tonübertragung?:
Even if the technology is developing all the time, only the analog transmission technology provides a transmission without latency (without delay) in real time for a payable price. For this, a worse quality and a sporadic noise is accepted.
The HD-transmission of photo drones have a latency of 0,5 - 1 seconds which is not an option for driving in first person view, where you need a fast reaction, but it's irrelevant to take pictures.
Why have the racing drone videos such a good quality?
It's because they "cheating" a bit. A racing drone have 2 cameras on board. A similarly analog onboard camera which transmit the picture to the pilot in real time and an action camera to record the flight which is shown to the spectators afterwards.
I have to say that it's also possible to get more than 25mW of transmission power with a special permission.
The video on the right shows the comparison between the mounted action camera and the active flight fpv camera.
Comparison between an analog fpv camera and the mounted action camera (user: FlyingBear)


